2018金砖+大赛之首届“无人机应用技能”赛项技术规程(精简版)
一、赛项名称
赛项编号: BRICS08
赛项名称:无人机应用技能大赛
英语翻译:Drone Application Skills Competition
赛项组别:高职组
赛项归属产业:无人机应用类
二、竞赛目的
本项赛事是在金砖国家“深化金砖伙伴关系,开辟更加光明未来”的时代背景下开展的一项大型赛事,通过成员国之间的交流合作,在金砖五国和一带一路范围内,促进无人机技术应用,推动无人机技术与产业应用结合。赛项体现了行、校、企联合设计思路,将现代企业的产品开发与实际生产过程设计到赛项中,以无人机组装、调试、应用飞行为内容,针对显示无人机行业典型工作岗位,培养学生无人机应用技能,达到以赛促教,以赛促学的目的,使学校能够更好地建设专业,提高教学质量,创新教学模式。
三、竞赛内容
竞赛内容将以任务书形式公布,赛前需要统一培训,如果报名人数超过30队,举行预选赛进行选拔。如果举行预选赛,成绩按照整体参赛队伍大排名,选择前30队伍参加决赛,决赛参赛队伍原则上为30个队伍。
经过对无人机行业进行深入的调研得知,随着无人机行业快速发展,无人机飞手、无人机调试、无人机组装等工作岗位人才短缺。通过大赛能够让学生对以上典型工作岗位的人员的技能培养,为职业院校专业建设奠定坚固基础,目的是为企业培养出此专业方向的紧缺人才。
整个竞赛过程,总的竞赛时间为3小时25分钟,分为第一阶段理论及法规考核(30分钟),第二阶段穿越机设计作品答辩(15分钟进行答辩环节,无人机设计组装需在场外完成,将设计好的产品带入现场),第三阶段无人机组装调试(1小时),第四阶段无人机飞行应用(1小时40分钟),这四阶段可以分离竞赛,四个阶段权重分别为10%,20%,20%,50%。
1、第一阶段:理论及法规考核
该阶段竞赛时间为30分钟。
该阶段重点考核:飞行原理、飞行器结构组成、多旋翼原理、导航知识、无人机飞行管理法规、无人机操控职业素养;
该阶段为标准化试卷(单项或多项选择题),采用人工或网络考核方式进行。
2、第二阶段:穿越机设计作品答辩
该阶段竞赛时间为15分钟,其中答辩陈述10分钟,专家提问评分5分钟。
无人机设计组装需在场外完成,将设计好的产品带入现场,需提供产品BOM清单,设计图纸,组装好的无人机。
答辩重点考核:创新素养、穿越机综合应用能力、穿越机成本考核;选手需将按要求设计的穿越机带到现场进行职业技能解析。主要考核选手应用制图设计、机械加工等综合知识进行创新设计的能力。根据任务书和机械设计、机械制造工艺水平和创新点的优劣程度评分。
参赛选手还需围绕“无人机装配、调试和飞行”等几个方面,进行技术文件展示及答辩汇报。答辩展示主要考察选手在执行工作任务过程中的直观展示性、功能性、价值导向性、经济性、生产和工作过程导向性、社会接受度、环保性、创造性等八个方面的职业能力。
3、第三阶段:无人机组装调试
该阶段竞赛时间为1小时,竞赛队完成三项竞赛任务。
任务1:无人机组装。利用指定无人机组装设备XXQY-UAV-01,设备中包含组装过程中所需全部工具,需对产品进行结构组装。模块主要考核选手对无人机的电子工艺以及无人机组装能力;
任务2:无人机飞控调试。基于任务1内容,通过地面站软件MissionPlanner,对无人机飞控进行调试, 其中包含机型选择、加速度计校准、磁罗盘校准、遥控器校准、电调校准、内部参数设定、解锁速度等调试内容;模块主要考核选手对无人机飞控调试、内部参数设定的调试能力;
任务3:无人机整机联调。基于任务1和任务2内容,加上遥控器,通过地面站软件MissionPlanner,对无人机进行整机调试,其中包含遥控器设置、接收机模式、飞行模式设置、遥控器解锁功能测试等内容;模块主要考核选手对无人机整机调试的能力。
4、第四阶段:无人机飞行应用
竞赛时间为1小时40分钟,竞赛队完成三项竞赛任务。
任务1:穿越机竞速飞行(穿越机为选手自行设计的第二阶段的原机型)。竞赛时间为30分钟,两次机会取最好成绩,飞行过程中不得飞过安全线,如有飞过,此次飞行计零分,FPV眼镜用户可自选是否使用。利用指定无人机穿越机装备XXQY-UAV-02,按照下面的路径示意图 1飞行,飞行区域设置 5 个 障碍圈位置,1#、3#、4#、5#是直径100cm 中心高度 2.5~5m 的圆形圈,2#是位于场地中心的半圆拱门圈(直径约 2.5 米)。选手从起降点起飞后必须按 1#→2#→3#→4#→2#→5#→1#穿圈顺序飞行2圈,最后一圈从 5#→起降点,飞行穿越圆圈时要求机头方向指向前进方向(即和图中箭头方向一致) ,裁判记录飞行时间和穿越成功次数。
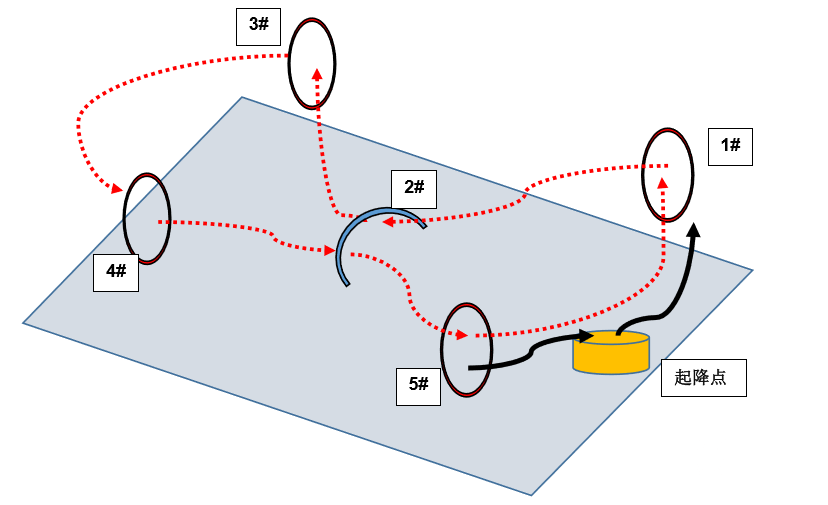
图1
任务2:飞行操控基本功考核。竞赛时间为30分钟,两次机会取最好成绩,飞行过程中不得飞过安全线,如有飞过,此次飞行计零分。
利用指定无人机装备XXQY-UAV-05,按照下面的路径示意图 2飞行,在手动控制模式状态下起飞,要求从起飞点垂直直线起飞(目测不能偏移出黄色区域),在离地高度 3 米~3.5 米范围内悬停 20~30 秒,悬停期间要求完成一个自转 360 度偏航动作;然后绕 2 根相距 6 米的杆飞行水平 8 字一个来回(飞行时机头方向指向前进方向,不能触碰立杆);最后降落在起飞点(图中起降点的中心圆区域),降落时飞机机身部位除桨叶外其他均不能压上黄色区域。
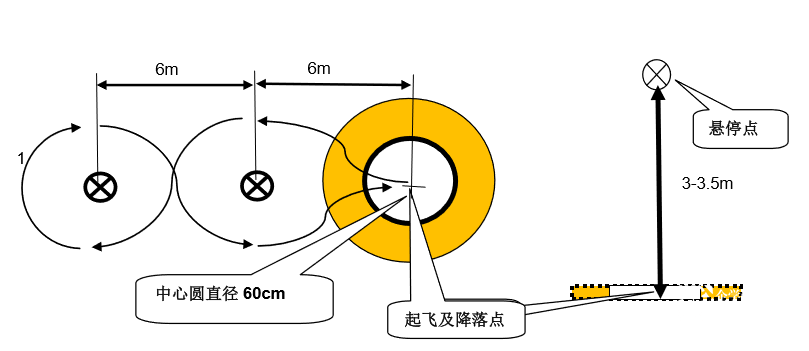
图2
任务3:四旋翼无人机应用技能。竞赛时间为40分钟,两次机会取最好成绩,飞行过程中不得飞过安全线,如有飞过,此次飞行计零分。
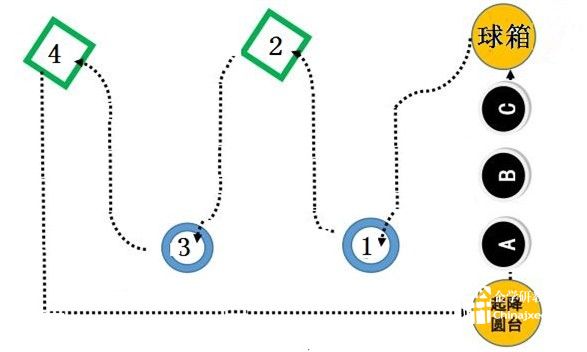
本赛项主要考核应用无人机物流运输,越障飞行应用综合能力。开始前选手需抽签,抽取所需抓取球的颜色,利用指定无人机装备XXQY-UAV-05,操控飞机从起点起飞,前往抓取点(球箱)抓取相应颜色的球,球箱中共有A、B、C三种颜色的球。然后按如图 3所示①-②-③-④的路径穿越障碍飞行,然后将球放到A、B、C相应颜色桶里,最后将飞机降到起降点。
图3
四、技术规范
本赛项要求具有的知识点、基础技术要求和技能要求为无人机组装、调试、飞行的应用等课程实训所涵盖的内容。
本赛项要求掌握的操作规程为竞赛指定设备所规定安全操作规程,详见设备使用手册。
五、技术平台
(一)计算机平台
赛场提供同一配置的计算机及软件。
1.硬件基本配置:双核处理器/4G内存/1T硬盘/1G独显/19寸LED显示器;
2.预装软件 :
(1)操作系统: Windows 7;
(2)文字处理软件: Office 2017;
(3)设计、编程软件:MissionPlanner。
(二) 无人机组装调试
比赛用的无人机组装调试设备选用XXQY-UAV-01型无人机组装实训系统。主要参数如下:
| 序号 |
分类 |
说明 |
数量 |
单位 |
| 1 |
实验箱 |
尺寸:500*360*130mm,金属外壳箱体结构,内部采用EVA设计,独立钥匙。 |
1 |
套 |
| 2 |
无人机结构件 |
智能飞控、飞控保护板、2200mAh锂聚合物电池组 3S、BB响、锂电池平衡充电器、电子调速器、电源分线板、飞控供电线、3.5mm母香蕉头、4mm热缩管(黑色)、4mm热缩管(红色)、14#AWG硅胶线、16#AWG硅胶线、T形插头、反转无刷外转子电机、正转无刷外转子电机、正螺旋桨、反螺旋桨、旋桨支撑垫、电机座、机臂、管夹、长铝柱、短铝柱、中心板、云台挂载板、减震海绵、脚架横撑、三通、0-90°脚架斜撑、背胶魔术贴、飞控数据下载线、长(短)螺丝、2.0毫米内六角螺丝刀、2.5毫米内六角螺丝刀、3M双面胶、剥线钳、电烙铁、电烙铁底座、特尖烙铁焊头、马蹄烙铁焊头、刀状烙铁焊头、助焊松香、高纯度活性焊锡丝、反扣扎带、8IN1模拟器、GPS(内置罗盘)、数传电台等。 |
1 |
套 |
| 3 |
软件系统 |
模拟飞行软件。 |
1 |
套 |
| 4 |
地面站软件。 |
1 |
套 |
| 5 |
软件狗 |
实现模拟飞行软件与遥控器连接授权。 |
1 |
套 |
| 6 |
遥控器 |
乐迪9通道遥控器配9通道接收机和3S遥控器专用电池。 |
1 |
套 |
1.整机采用碳纤维和航空铝设计,固定牢固,质量轻,整机重量(包含机架,电机,螺旋桨,电池,gps,电台)约为1063g。
2.锂聚合物电池组:格氏品牌3S 2200mAh。
3.锂电池平衡充电器:自动检测电池数和容量,自动设置充电输出,锂电池集成电池电压平衡器,高精度的充电锂余额+/-0.01V,高功率,高性能充电器,XH-样式脂质平衡端口的,电源输入为DC11~18V/ AC100至240V。锂充电速率高达5.0安培(最大50瓦),镍氢充电速率高达到5.0安培(最大50瓦),输出功率为50瓦,充电速功率:1.5C,电池类型:锂电2~6S(系列)/镍氢电池的1至15Cells。
4.电子调速器:30A无刷电调,自动调教油门,采用进口MOS管,同步整流技术,效率高,热损小,温度低。
5.电源分线板:双路可调3-20V BEC输出,每路可输出2-3A。
6.电烙铁:60W恒温内热电烙铁,M7恒温芯片,进口陶瓷芯,防静电防击穿。配有烙铁架,海绵,焊锡丝,松香,特尖头,刀头,马蹄头。
7.内六角螺丝刀:2.0毫米和2.5毫米个一把,进口白钢,12.9级硬度。
8.GPS:内置罗盘,工作电压DC5V,搜星时间约为20S,精度0.9米左右。
9.数传电台:CP2102高品质USB转TTL芯片, 915MHZ ,支持MWC/APM/PX4/Pixhawk等开源飞控,接收灵敏度为 -118 dBm,全双工通信2路自适应TDM,可以矫正高达25%的数据位错误,基于Si1000微控制器和Si4432无线模块。
10.无刷外转子电机:采用T-MOTOR电机正反自锁桨电机,型号为2213,KV950。
11.智能飞控----无人机智能控制核心,大脑。
智能飞控(自主研发,仿冒必究)整体采用航空铝外壳设计,螺丝采用铝材质,质量轻,减少磁干扰,增强飞控稳定性。智能飞控创新设计,是飞控性能更稳定,其中,控制芯片采用双单片机控制,两套姿态传感器和气压高度计,均采用原装进口芯片。智能飞控使用可靠的miniUSB,开口向上满足飞行器各种安装方式下方便使用,免于外接USB接口。集成空速传感器,可以支持固定翼全自主起降航线飞行。免于外接空速传感器模块,可直连空速管。开放两个单片机SWD仿真调试接口,可以满足各种层次开发者需求,甚至可以把它当做集成传感器的单片机板,从零开始编写底层代码。集成多组外设I2C总线接口,免于外接转换器。开放内置I2C接口。集成独立高电压测量接口,可以测量12s电源,免于连接3dr模块。集成蜂鸣器,免于外接蜂鸣器模块。突出外壳的独立外部固定孔,可以灵活外接螺钉可靠固定或可调节硬度减震器。
智能飞控能够实现多旋翼无人机和固定翼无人机的全部功能,该智能飞控主要配有15个传感器模块和10个外接接口。
(三) 穿越机竞速飞行
比赛用的穿越机竞速飞行设备为第二阶段穿越机设计技能及答辩的设备,所设计设备需满足以下要求:
无人机轴距小于等于250mm;电机kv值小于等于2300kv;螺旋桨尺寸为4寸/5寸/6寸;电调小于等于30A;电池需满足1300mah, 4s,14.8v,75C;飞控为F4飞控;FPV第一视角眼镜,图传,摄像头等不做要求,可自行选择,可选择不用。
(四) 飞行操控基本功考核和四旋翼无人机应用技能
比赛用的穿越机竞速飞行设备选用XXQY-UAV-05型无人机加载实训系统。主要参数如下:
| 序号 |
分类 |
说明 |
数量 |
单位 |
| 1 |
实验箱 |
金属外壳箱体结构,内部采用EVA设计,独立钥匙。 |
1 |
套 |
| 2 |
无人机整机(组装好) |
智能飞控、4000mAh锂聚合物电池组 4S*2个、好盈4和1电子调速器、飞控供电线、3.5mm母香蕉头、4mm热缩管(黑色)、4mm热缩管(红色)、14#AWG硅胶线、16#AWG硅胶线、T形插头、反转无刷外转子电机、正转无刷外转子电机、正螺旋桨、反螺旋桨、电机座、机臂、管夹、长铝柱、短铝柱、中心板、云台挂载板、减震海绵、脚架横撑、三通、0-90°脚架斜撑、背胶魔术贴、飞控数据下载线、长(短)螺丝、2.0毫米内六角螺丝刀、2.5毫米内六角螺丝刀、1.5毫米内六角螺丝刀、5.5套筒、3M双面胶反扣扎带、两轴云台、小蚁相机、内存卡、图传、5寸显示屏等。 |
1 |
套 |
| 3 |
软件 |
地面站软件。 |
1 |
套 |
| 4 |
遥控器 |
乐迪9通道遥控器配9通道接收机和3S遥控器专用电池。 |
1 |
套 |
1、锂聚合物电池组:格氏4000mah,4s,25c,2块。
2、内六角螺丝刀:2.0毫米、2.5毫米、1.5毫米、5.5box套筒各一把,进口白钢,12.9级硬度。
3、无刷外转子电机:采用T-MOTOR电机正反自锁桨电机,型号为2213,KV950。
4、两轴云台:1、支持供电电压反接保护及电压补偿。2、支持电机驱动端短路保护。3、支持初始俯仰角自定义。4、支持感度参数调节和软件三维姿态显示。5、支持摇杆速率模式和位置模式。6、支持接收机:常规接收机、S-BUS接收机,DSM2/DSMJ/DSMX接收机。7、支持遥控设备:PPM/PCM/2.4G 。8、工作电压:DC 7.4V~14.8V (推荐12V,三节锂电)。9、工作电流:200mA-500mA(与供电电压及电机功率有关)。10工作环境温度:-15℃~65℃。11处理器为双32位高速ARM核处理器。12传感器为三旋翼MEMS陀螺仪和三旋翼MEMS加速度计。13最大角速率:2000°/sec。14最大加速度:16g。15控制频率:2000Hz。16、电机驱动频率:20KHz(无噪声平滑驱动) 。17、控制精度:0.1°。18、控制角度范围:-45°~45°(滚转),-135°~90°(俯仰)。19、姿态解算算法为专用于无刷电机驱动云台的解耦EKF算法。
5、运动相机:采用专业运动视频处理器A7LS图像处理器,开创性的图像处理技术结合超高速下昂速处理、动态范围增强、噪点消除算法,独有的高保真H264编码,提供最高品质的高清影像。索尼1600万像素CMOS图像传感器,采用背照式图像传感技术,具有高感光,低噪点的特点。超大广角155度。高速摄像1080P60帧/秒。内存卡8g。
6、图传:采用5.8G 200MW 32频航拍专用图传,发射频率: 5.6-5.9Ghz,电压输入: 7-24V,发射功率:200mw,工作电流: 190mA /12V,工作温度: -10-+85℃,视频带宽: 8M,音频编码: 6.5M。
7、5寸显示一体机:480×272(SD 版),背光源 LED,450 cd/m 2 (SD 版),显示比例 16:9,响应时间 10ms,色彩制式 PAL/NTSC,电源 内置电池工作时间 2.5-3 小时,输入 信号 视频(PAL/NTSC),输出 信号 视频信号,配天线 接口类型 RP-SMA 内螺纹,内孔,5.8G 灵敏度 -94db。
六、 成绩评定
本赛项评分标准按竞赛任务分述如下:
(一)评分指标体系
| 比赛内容 |
模块 |
考核指标 |
比例 |
| 理论及法规考核 |
第一阶段 |
飞行法规、飞行原理等 |
10% |
| 穿越机设计技能 |
第二阶段 |
制图设计、机械加工、答辩 |
20% |
| 无人机组装调试 |
第三阶段
任务1 |
无人机机构组装 |
4% |
第三阶段
任务2 |
无人机飞控调试 |
8% |
第三阶段
任务3 |
无人机整机联调 |
8% |
| 无人机飞行应用 |
第四阶段
任务1 |
穿越机竞速飞行 |
15% |
第四阶段
任务2 |
飞行操控基本功考核 |
10% |
第四阶段
任务3 |
四旋翼无人机应用技能 |
25% |
(二)穿越机设计技能及答辩---评分标准,总分20分。
| 考试内容 |
评分标准 |
标准分 |
| 答辩展示 |
结构设计,需提供设计图纸(纸质三份) |
4 |
| 节约成本,需提供产品bom |
4 |
| 人性化设计,产品外观 |
2 |
| 环保与创新性,4个创新点 |
8 |
| 表达 |
8 |
(三)无人机组装调试---评分标准
| 序号 |
考试内容 |
评分标准 |
标准分 |
| 1 |
机架组装 |
以下中心版安装、机臂及电机座、云台挂载板和飞控保护板、脚架安装4部分进行评分。 |
4 |
| 1、全部组装合理,固定牢固,得满分。 |
| 2、部分组装不合理,不牢固,每部分扣1分。 |
| 2 |
电机安装 |
以下电机位置、电机正反转2部分进行评分。 |
2 |
| 1、电机位置和电机正反转都正确,得满分。 |
| 2、电机位置或电机正反转安装错误,每部分扣除1分。 |
| 3 |
电源分控板焊接 |
以焊接牢固没有虚焊、美观2部分进行评分。 |
2 |
| 1、焊接牢固,没有虚焊,美观,得满分。 |
| 2、有虚焊不牢固货不美观,每部分扣除1分。 |
| 4 |
遥控器设置 |
以下摇杆模式(美国手模式)、机型选择、接收机模式SBUS、切换飞行模式4部分进行评分。 |
4 |
| 1、全部设置正确,得满分。 |
| 2、部分设置不正确,每部分扣1分。 |
| 5 |
无人机校准 |
以下模型选择、加速度计校准、陀螺仪校准、遥控器校准、飞行模式(三种,包含自稳、定高、自动降落)、电调校准6部分进行评分。 |
6 |
| 1、全部设置正确,得满分。 |
| 2、部分设置不正确,每部分扣1分。 |
| 6 |
整机调试 |
以下遥控器解锁、遥控器控制电机2部分进行评分。 |
2 |
| 1、全部设置正确,得满分。 |
| 2、部分设置不正确,每部分扣1分。 |
(四)无人机飞行应用---评分标准
| 内容 |
标准分 |
| 穿越机竞速飞行 |
15 |
| 1 |
穿越每个圆形圈 |
1#、3#、4#、5#圈共2次,按机头方向每穿越一次,得0.5分,未按机头方向过圈得不得分 |
4 |
| 2 |
穿越拱形门次数 |
2#拱形门共4次,按机头方向每穿越一次,得0.5分,未按机头方向过圈不得分 |
2 |
| 3 |
记录飞行时间T=? |
达最少飞行时间得满分,每超过1%扣0.1分,扣完为止 |
6 |
| 4 |
飞机正常降落在起降区域 |
需要飞机中心降落在区域内,中心压线不得分 |
1 |
| 飞行操控基本功考核 |
10 |
| 1 |
在起飞点垂直起飞 |
偏移小于30cm |
3 |
| 2 |
距起点3--3.5m的垂直高度内手动悬停30秒 |
高度和悬停时间各占2分,高度和悬停偏移小于30cm得满分 |
4 |
| 3 |
高度3-3.5m处偏航自转360 |
高度1分,旋转2分,高度和旋转偏移小于50cm得满分 |
3 |
| 4 |
s形路径飞行,水平8字 |
触碰杆一次扣0.5分,没有完成8字得0分,8字重叠扣1分,未按机头方向飞行直接扣2分 |
3 |
| 5 |
降落在起降平台内 |
仅机身,浆叶不管,脚架不得超出起降平台 |
2 |
| 四旋翼无人机应用技能(越障、物流) |
25 |
| 1 |
越障技能 |
穿越1,3每项得1分,未按机头方向过圈不得分,穿越2、4每项得2分,未按机头方向过圈不得分 |
6 |
| 2 |
物流 |
抓取到所抽颜色球得4分,放到指定球桶得4分,飞行过程中球掉,总分扣8分。 |
8 |
| 3 |
完成飞行时间 |
最快速度为满分,其他和最短时间比较,1%一个阶梯,扣0.1分,扣完为止 |
11 |